X-STEER
X-STEER uses CAN-BUS technology to connect the bridge to the engine room.
There is no more tubing and no more worrying about potential oil leaks with X-STEER as it uses all the power of mechatronics to boost the helm feedback and responsiveness.
X-STEER is a tailor-made system that can be completely customized to suit any model of boat.

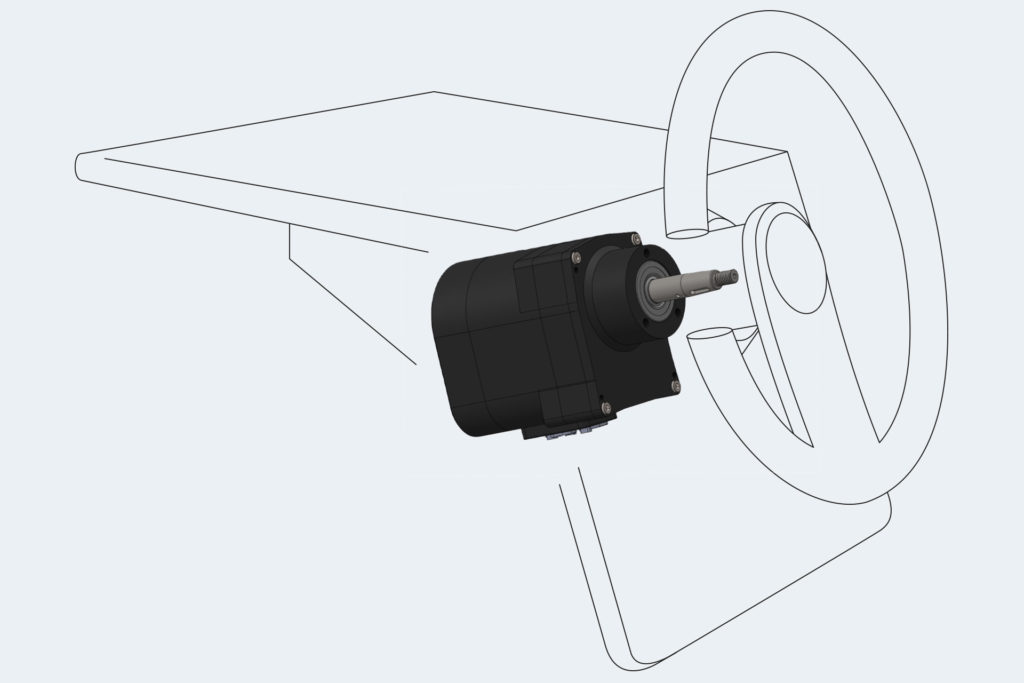
Haptic – Thanks to a series of sensors, the XENTA Active Helm in the X-STEER System interprets the helmsman’s command and implements it with optimal efficiency to ensure the boat executives the perfect turn.
Active – This can adjust perceived wheel resistance, viscosity and inertia to give the helmsman a superior automobile-style steering experience. The X-STEER System can change the required number of revolutions of the wheel and the steering effort as a function of speed, trim and driving conditions and thus modifying the feedback to the helmsman. At low speeds, it can reduce the number of revolutions required to move the rudders, improving the boat’s responsiveness and maneuverability. At high speeds, on the other hand, the system requires more wheel rotation to guarantee maximum sensitivity and precision control.
Self-centering – The system is programmed to optimize the wheel’s return to center at the end of a high speed turn in the most efficient (i.e. fastest) yet safest way possible.
Autocourse – Although not an autopilot in the conventional sense of the term, this function allows the helmsman to maintain the selected bow direction without needing to continuously correct it. This is true in all sea or current conditions. The smart system “learns” the helmsman’s wheel movements and then uses them to maintain a specific direction and progressively replace the helmsman in a natural way.
X-STEER system will continue to control the rudders autonomously, leaving the helmsman to supervise cruising.
Electronic Tie Bar
The two rudders are moved independently. The smart system controls:
– Rudders are parallel when necessary
– Different toe angles at different speeds
– Asymmetric and variable turning angles to adapt to different conditions.

The result is perfect turns in perfect trim at all speeds and all load conditions with minimum loss of speed and minimum turning radius.


